Wandering nomads
It's 1200 BC, and you're a nomad.
One fine day, you look around, and decide that where you live kinda sucks: it's dry and hot, and growing crops is hard.
You squint your eyes on the horizon and notice signs that things might be a bit better 30 miles or so away, where a line of tall trees stand out, making you suspect the presence of a river.
You and your tribe move there and discover that indeed, there is a river, and you settle down next to it.
For a time, life is much easier.
But soon, other dusty tribes from other corners of the surrounding desert begin to take notice as well.
They move in, which makes the area stand out even more prominently, which attracts even more outsiders.
Soon, the tiny river is swarming with nomad settlements; so many, in fact, that the river begins to get polluted, and the once lush surrounding land turns barren.
Ironically, this once fertile oasis has become a victim of its own fertility.
This puts pressure on the nomads, some of whom leave, in search of the next best place.
Some of the less intrepid settlers, on the other hand, decide to stay, reasoning that the land will rebound after these recent departures.
And so, nomadic life is defined by this tension between stasis and movement.
Ideally, we'd all like to remain comfortable where we are, but when times are hard and the land is unworkable, that's not an option.
In this post, I want to explore how we can model this sort of dynamic.
We'll of course look at pretty pictures and videos, but I'm hoping to also shed some light on the mathematical structures that drive this process.
The overall vision
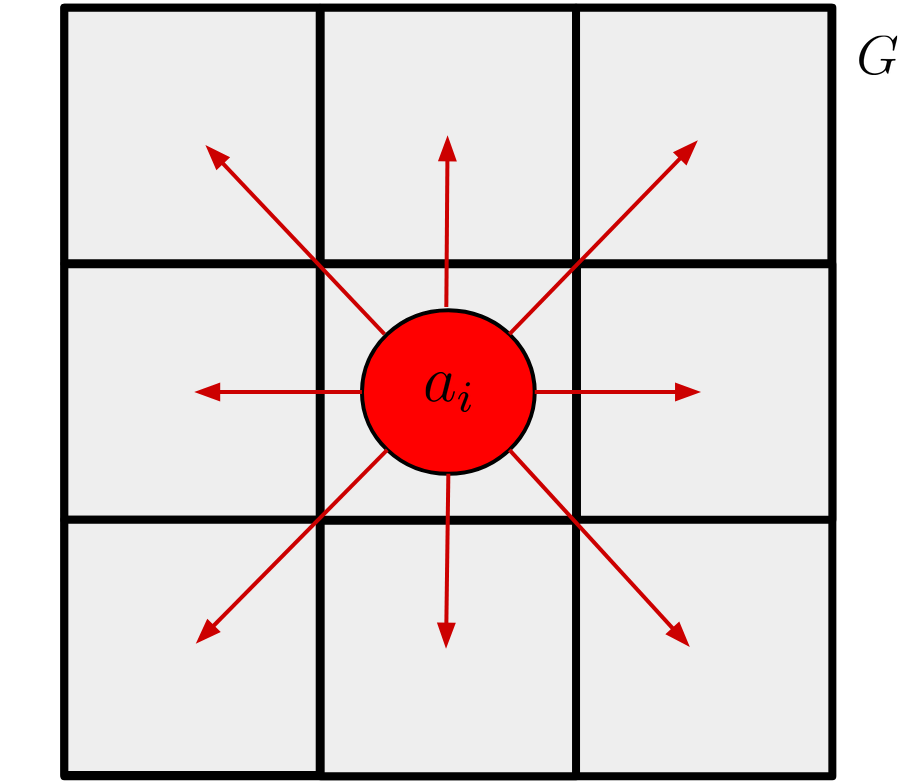
We'll be building an agent-based model, i.e. a model where a discrete number of nomads (agents) move throughout space and interact with each other and with the local terrain in some way.
At any given moment in time, an agent will look at their surroundings and decide whether the land on which they're situated is good enough for them to settle or not.
If it is, then they'll stop wandering, settle in, and form a "village"; if not, they'll continue wandering in search of better land.
Here's where things get interesting: a village can degrade the quality of the land it sits on.
If that land degrades enough, the nomad that settled in that village can decide to disband it and continue on wandering.
So, the dynamics evolve under two-way coupling: the terrain quality determines whether villages form, and the presence of villages determines the quality of the terrain.
Parting thoughts
There's a lot here that I find fascinating.
Probably top of the list is the concept of emergence, and how complex, large scale behavior can self-organize from fairly simple rules at the small scales.
In these simulations, we see this manifest as the competition that evolves between the order-imposing ripple kernel and the diffusive kernel.
It's an interesting lesson in how sometimes, really beautiful behavior is the product of a fight between opposing forces.
Another prominent duality is stasis versus flow.
Clearly, all agents want to settle into a permanent village, but the very act of doing so depletes the resources on which their village stands, making it less stable over time.
This is of course exacerbated by the fact that all agents want the same thing, which leads to overpopulation.
So you get a global population that is constantly going through cycles: for a stretch, things might seem pretty ordered and static, only to be followed by an equally long period of reshuffling and migration.
Nature seems to be playing with these poor nomads, who look like they're always just a couple steps behind it, always chasing the nearest shiny patch of land, only to have to start all over just as soon as they reach it.